进程 & 线程
进程PCB,线程与进程的区别,线程的实现(用户级,内核级)
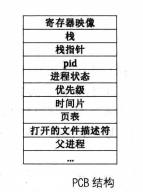
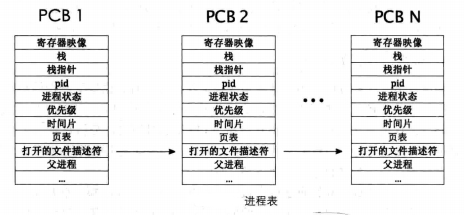
进程PCB
进程控制块(PCB)是系统为了管理进程设置的一个专门的数据结构。系统用它来记录进程的外部特征,描述进程的运动变化过程。同时,系统可以利用PCB来控制和管理进程,所以说,PCB(进程控制块)是系统感知进程存在的唯一标志。
PCB通常记载进程之相关信息,包括:
- 程序计数器:接着要运行的指令地址。
- 进程状态:可以是new、ready、running、waiting或 blocked等。
- CPU暂存器:如累加器、索引暂存器(Index register)、堆栈指针以及一般用途暂存器、状况代码等,主要用途在于中断时暂时存储数据,以便稍后继续利用;其数量及类因电脑架构有所差异。
- CPU排班法:优先级、排班队列等指针以及其他参数。 存储器管理:如标签页表等。
- 会计信息:如CPU与实际时间之使用数量、时限、账号、工作或进程号码。
- 输入输出状态:配置进程使用I/O设备,如磁带机。
CPU执行流
cpu在任务之间切换,这样提高CPU的利用率。
任务就是一段指令流,只有"指令"才有执行的能力。
指令流对应于代码,大到可以是整个程序文件,即进程,小到可以是一个功能独立的代码块,即函数,而线程本质上就是函数。
指令流是独立的,它的独立性体现在每个执行流都有自己的械、一套自己的寄存器映像和内存资源,这是 Intel 处理器在硬件上规定的,其实这正是执行流的上下文环境。因此,我们要想构造一个执行流,就要为其提供这一整套的资源。
在任务调度器的眼里,只有执行流才是调度单元,即处理器上运行的每个任务都是调度器给分配的执行流,只要成为执行流就能够独立上处理器运行了,也就是说处理器会专门运行执行流中的指令。
线程
线程是一套机制,此机制可以为一般的代码块创造它所依赖的上下文环境,从而让代码块具有独立性,因此在原理上线程能使一段函数成为调度单元(或称为执行流),使函数能被调度器“认可”,从而能够被专门调度到处理器上执行。这样,函数就可以被加入到线程表中作为调度器的调度单元,从而有机会单独获得处理器资源,也就是说,处理器不是把线程中调用的函数和其他指令混在一块执行的,或者说不是在执行整个进程时顺便执行了该函数,而是单独且专门执行了此函数。
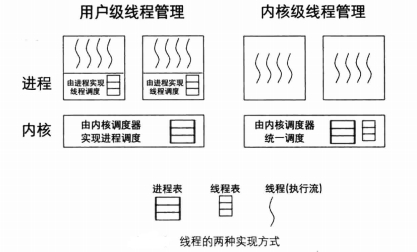
在用户进程中实现线程
线程的调度算法是由用户程序自己实现的,可以根据实际应用情况为某些线程加权调度。
将线程的寄存器映像装载到 CPU 时,可以在用户空间完成,即不用陷入到内核态,这样就免去了进入内核时的入栈及出栈操作。
进程中的某个线程若出现了阻塞(通常是由于系统调用造成的),操作系统不知道进程中存在线程,它以为此进程是传统型进程(单线程进程),因此会将整个进程挂起,即进程中的全部线程都无法运行,
线程在用户空间中实现,线程属于进程自己的"家务事"操作系统根本不知道它的存在。这就导致了:如果在用户空间中实现线程,但凡进程中的某个线程开始在处理器上执行后,只要该线程不主动让出处理器,此进程中的其他线程都没机会运行。也就是说,没有保险的机制使线程运行“适时飞即避免单一线程过度使用处理器,而其他线程没有调度的机会。这只能凭借开发人员“人为”地在线程中调用类似pthread_yield 或 pthread_exit 之类的方法使线程发扬“高风亮节”让出处理器使用权,此类方法通过回调方式触发进程内的线程调度器,让调度器有机会选择进程内的其他线程上处理器运行。重复强调:这里所说的“线程让出处理器使用权”,不是将整个进程的处理器使用权通过操作系统调度器交给其他进程,而是将控制权交给此进程自己的线程调度器,由自己的调度器将处理器使用权交给此进程中的下一个线程。
和在内核空间实现相比,只是在内部调度时少了陷入内核的代价,确实相当于提速,但由于整个进程占据处理器的时间片是有限的,这有限的时间片还要再分给内部的线程,所以每个线程执行的时间片非常非常短暂,再加上进程内线程调度器维护线程表、运行调度算法的时间片消耗,反而抵销了内部调度带来的提速。
线程在内核空间实现
相比在用户空间中实现线程,内核提供的线程相当于让进程多占了处理器资源,比如系统中运行有进程 A 和一传统型进程 B,此时进程 A 中显式创建了 3 个线程,这样一来,进程 A 加上主线程便有了 4 个线程,加上进程 B,内核调度器眼中便有了 5 个独立的执行流,尽管其中 4 个都属于进程 A,但对调度器来说这4个线程和进程一样被调度,因此调度器调度完一圈后,进程 A 使用了 80%的处理器资源,这才是真正的提速。
另一方面的优点是当进程中的某一线程阻塞后,由于线程是由内核空间实现的,操作系统是认识线程的,所以就只会阻塞这一个线程,此线程所在进程内的其他线程将不受影响,这又相当于提速了 。
缺点是用户进程需要通过系统调用陷入内核,这多少增加了 一些现场保护的操作,这还是会消耗一些处理器时间,但和上面的大幅度提速相比,这不算什么大事。
内核空间中实现线程,并验证运行
intr_stack定义了程序的中断栈,无论进程还是线程,此结构用于中断发生时保护程序的上下文环境
/*********** 中断栈intr_stack ***********
* 此结构用于中断发生时保护程序(线程或进程)的上下文环境:
* 进程或线程被外部中断或软中断打断时,会按照此结构压入上下文
* 寄存器, intr_exit中的出栈操作是此结构的逆操作
* 此栈在线程自己的内核栈中位置固定,所在页的最顶端
********************************************/
struct intr_stack {
uint32_t vec_no; // kernel.S 宏VECTOR中push %1压入的中断号
uint32_t edi;
uint32_t esi;
uint32_t ebp;
uint32_t esp_dummy; // 虽然pushad把esp也压入,但esp是不断变化的,所以会被popad忽略
uint32_t ebx;
uint32_t edx;
uint32_t ecx;
uint32_t eax;
uint32_t gs;
uint32_t fs;
uint32_t es;
uint32_t ds;
/* 以下由cpu从低特权级进入高特权级时压入 */
uint32_t err_code; // err_code会被压入在eip之后
void (*eip) (void);
uint32_t cs;
uint32_t eflags;
void* esp;
uint32_t ss;
};
- 线程栈,PCB
/* 自定义通用函数类型,它将在很多线程函数中做为形参类型 */
typedef void thread_func(void*);
/* 进程或线程的状态 */
enum task_status {
TASK_RUNNING,
TASK_READY,
TASK_BLOCKED,
TASK_WAITING,
TASK_HANGING,
TASK_DIED
};
/*********** 线程栈thread_stack ***********
* 线程自己的栈,用于存储线程中待执行的函数
* 此结构在线程自己的内核栈中位置不固定,
* 用在switch_to时保存线程环境。
* 实际位置取决于实际运行情况。
******************************************/
struct thread_stack {
uint32_t ebp;
uint32_t ebx;
uint32_t edi;
uint32_t esi;
/* 线程第一次执行时,eip指向待调用的函数kernel_thread
其它时候,eip是指向switch_to的返回地址*/
void (*eip) (thread_func* func, void* func_arg);
/***** 以下仅供第一次被调度上cpu时使用 ****/
/* 参数unused_ret只为占位置充数为返回地址 */
void (*unused_retaddr);
thread_func* function; // 由Kernel_thread所调用的函数名
void* func_arg; // 由Kernel_thread所调用的函数所需的参数
};
/* 进程或线程的pcb,程序控制块 */
struct task_struct {
uint32_t* self_kstack; // 各内核线程都用自己的内核栈
enum task_status status;
uint8_t priority; // 线程优先级
char name[16];
uint32_t stack_magic; // 用这串数字做栈的边界标记,用于检测栈的溢出
};
void thread_create(struct task_struct* pthread, thread_func function, void* func_arg);
void init_thread(struct task_struct* pthread, char* name, int prio);
struct task_struct* thread_start(char* name, int prio, thread_func function, void* func_arg);
- call 和 ret 汇编理解参考如下
http://blog.csdn.net/qq_26437925/article/details/70947174
- 线程相关函数
/* 由kernel_thread去执行function(func_arg) */
static void kernel_thread(thread_func* function, void* func_arg) {
function(func_arg);
}
/* 初始化线程栈thread_stack,将待执行的函数和参数放到thread_stack中相应的位置 */
void thread_create(struct task_struct* pthread, thread_func function, void* func_arg) {
/* 先预留中断使用栈的空间,可见thread.h中定义的结构 */
pthread->self_kstack -= sizeof(struct intr_stack);
/* 再留出线程栈空间,可见thread.h中定义 */
pthread->self_kstack -= sizeof(struct thread_stack);
struct thread_stack* kthread_stack = (struct thread_stack*)pthread->self_kstack;
kthread_stack->eip = kernel_thread;
kthread_stack->function = function;
kthread_stack->func_arg = func_arg;
kthread_stack->ebp = kthread_stack->ebx = kthread_stack->esi = kthread_stack->edi = 0;
}
/* 初始化线程基本信息 */
void init_thread(struct task_struct* pthread, char* name, int prio) {
memset(pthread, 0, sizeof(*pthread));
strcpy(pthread->name, name);
pthread->status = TASK_RUNNING;
pthread->priority = prio;
/* self_kstack是线程自己在内核态下使用的栈顶地址 */
pthread->self_kstack = (uint32_t*)((uint32_t)pthread + PG_SIZE);
pthread->stack_magic = 0x19870916; // 自定义的魔数
}
/* 创建一优先级为prio的线程,线程名为name,线程所执行的函数是function(func_arg) */
struct task_struct* thread_start(char* name, int prio, thread_func function, void* func_arg) {
/* pcb都位于内核空间,包括用户进程的pcb也是在内核空间 */
struct task_struct* thread = get_kernel_pages(1);
init_thread(thread, name, prio);
thread_create(thread, function, func_arg);
asm volatile ("movl %0, %%esp; pop %%ebp; pop %%ebx; pop %%edi; pop %%esi; ret" : : "g" (thread->self_kstack) : "memory");
return thread;
}
- PCB从内核空间中申请一页内存(即4096字节),
*thread指向PCB最低地址
/* pcb都位于内核空间,包括用户进程的pcb也是在内核空间 */
struct task_struct* thread = get_kernel_pages(1);
执行线程函数时,eip指向kernel_thread,处理器进入kernel_thread函数体时,栈顶为返回地址,栈顶地址加上4为参数function,栈顶地址加上8为参数func_arg
/* 由kernel_thread去执行function(func_arg) */
static void kernel_thread(thread_func* function, void* func_arg) {
function(func_arg);
}
- 使得PCB结构指针thread的
thread->sel_kstack作为栈顶
movl %0, %esp
弹出栈,这几个寄存器在线程栈中定义了的,初始为0,线程执行过程中这几个寄存器值变化。在函数调用时,ebp,ebx,edi,esi和esp这5个寄存器归主调用函数所用,其余寄存器归被调用函数所用,esp是栈顶,其值由函数调用约定来保证,所以线程栈中只保存了4个寄存器的值,在函数切换时,这4个寄存器的值会被保存起来。
pop %%ebp;
pop %%ebx;
pop %%edi;
pop %%esi;
/* 初始化线程栈thread_stack,将待执行的函数和参数放到thread_stack中相应的位置 */
void thread_create(struct task_struct* pthread, thread_func function, void* func_arg) {
/* 先预留中断使用栈的空间,可见thread.h中定义的结构 */
pthread->self_kstack -= sizeof(struct intr_stack);
/* 再留出线程栈空间,可见thread.h中定义 */
pthread->self_kstack -= sizeof(struct thread_stack);
struct thread_stack* kthread_stack = (struct thread_stack*)pthread->self_kstack;
kthread_stack->eip = kernel_thread;
kthread_stack->function = function;
kthread_stack->func_arg = func_arg;
kthread_stack->ebp = kthread_stack->ebx = kthread_stack->esi = kthread_stack->edi = 0;
}
ret会把栈顶数据作为返回地址送给CPU的eip去执行,而此时栈顶就是kernel_thread函数(再thread_create函数中kernel_thread赋值给了eip),kernel_thread会去执行线程函数function(func_arg),这样线程就开始执行了。
测试代码和运行截图
#include "print.h"
#include "init.h"
#include "thread.h"
void k_thread_a(void*);
int main(void) {
put_str("I am kernel\n");
init_all();
thread_start("k_thread_a", 31, k_thread_a, "argA ");
while(1);
return 0;
}
/* 在线程中运行的函数 */
void k_thread_a(void* arg) {
/* 用void*来通用表示参数,被调用的函数知道自己需要什么类型的参数,自己转换再用 */
char* para = arg;
while(1) {
put_str(para);
}
}
运行截图:线程中不断的打印参数