硬件驱动
bochs的bximage命令创建硬盘,BIOS识别
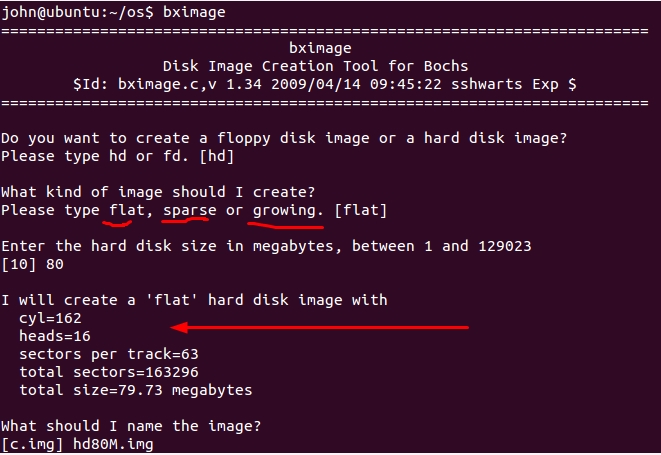
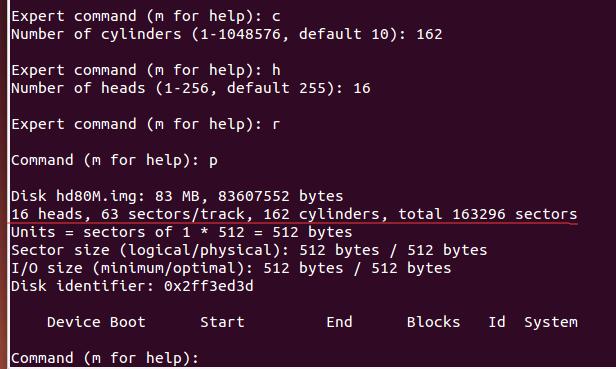
创建出的硬盘有格式,并且详细信息可以看到
- 柱面数 cyl=162
- 磁头数 heads=16
- 每磁道扇区数 sectors per track=63
- 总共的扇区数 total sectors=163296
- 总共大小 total size=79.73 megabytes
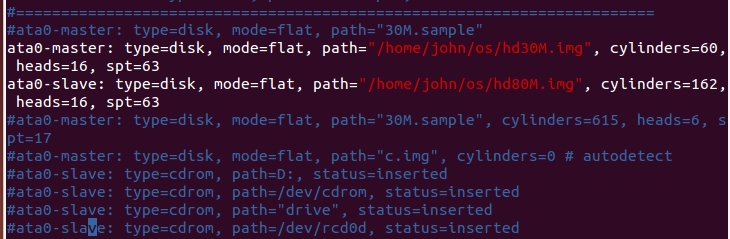
在bochs的配置文件中添加从盘hd80M.img
ata0-master: type=disk, mode=flat, path="/home/john/os/hd30M.img", cylinders=60, heads=16, spt=63
ata0-slave: type=disk, mode=flat, path="/home/john/os/hd80M.img", cylinders=162, heads=16, spt=63
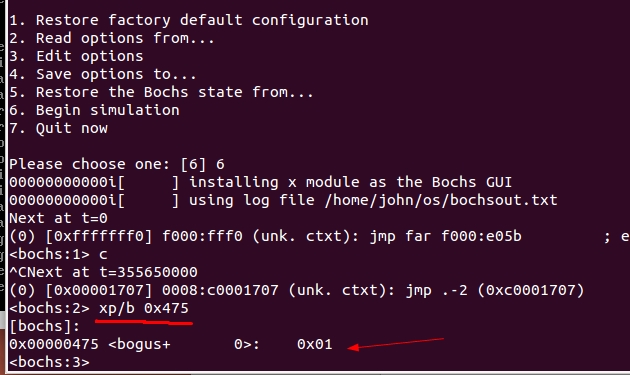
- 在物理地址
Ox475处存储着主机上安装的硬盘的数量,它是由 BIOS 检测并写入的,
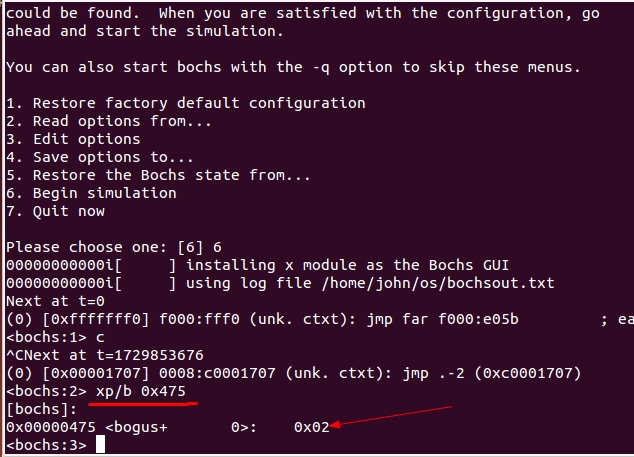
bochs运行后,ctrl+c中断,然后使用xp命令查看
- 只有一个主磁盘
- 添加hd80M.img的从盘
磁盘相关概念回顾
硬盘容量=单片容量×磁头数。
单片容量=每磁道扇区数×磁道数目×一个扇区大小。
扇区大小一般是512字节,扇区是硬盘读写的基本单位
磁盘读写很慢,因此操作系统不可能一次只写一个扇区,为了优化 1/0,操作系统把数据积攒到“多个扇区”时再一次性写入磁盘,这里的“多个扇区”就是指操作系统的簇或块。通常标准库函数还进行了二次优化,数据可以积攒到多个族或块时才写入,不过标准库中还提供了控制选项,可以立即把数据刷进硬盘。
以hd80M.img为例
* 柱面数 cyl=162
* 磁头数 heads=16
* 每磁道扇区数 sectors per track=63
* 总共的扇区数 total sectors=163296
* 总共大小 total size=79.73 megabytes
16(磁头数) 162 (每个磁头的磁道数) 63(m每个磁道的扇区数)* 512 (每个扇区的大小)= 83607552B 即 79.73MB
磁盘分区概念
熟悉的磁盘分区格式: MBR, GPT
分区:人为地将硬盘上的柱面扇区划分成不同的分组,每个分组都是单独的分区。各分区都有“描述符”来描述分区本身所在硬盘上的起止界限等信息.
MBR分区中有个 64 字节“固定大小”的数据结构,这就是著名的分区表,分区表中的每个表项就是一个分区的“描述符”,表项大小是 16 字节,因此 64 字节的分区表总共可容纳 4 个表项,这就是为什么MBR分区格式的硬盘仅支持 4 个分区的原因。
MBR (MainBootR四ord )即主引导记录,它是一段引导程序,其所在的扇区称为主引导扇区,该扇区位于 0 盘。道 1 扇区(物理扇区编号从 1 开始,逻辑扇区地址 LBA 从 0 开始),也就是硬盘最开始的扇区,扇区大小为 512 宇节,这 512 字节内容由三部分组成。
- 主引导记录 MBR
- 磁盘分区表 DPT
- 结束魔数 55AA ,表示此扇区为主引导扇区,里面包含控制程序
MBR引导程序位于主引导扇区中偏移 0~OxlBD 的空间,共计 446 字节大小,这其中包括硬盘参数及部分指令(由 BIOS 跳入执行),它是由分区工具产生的,独立于任何操作系统。
OxlBD-OxlFD 64字节就是磁盘分区表 DPT
磁盘分区表( Disk Partition Table )简称 DPT,是由多个分区元信息汇成的表,表中每一个表项都对 应一个分区,主要记录各分区的起始扇区地址,大小界限等 。16字节内容如下
魔数 55AA 作为主引导扇区的有效标志,位于扇区偏移 OxlFE~OxI FF,也就是最后 2 个字节。
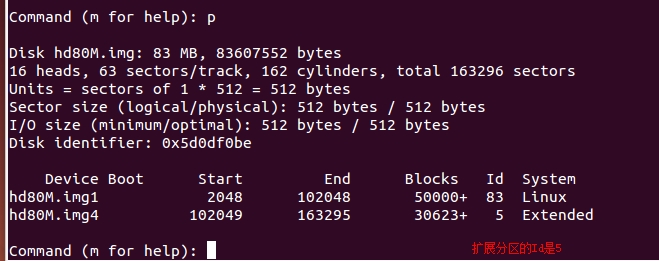
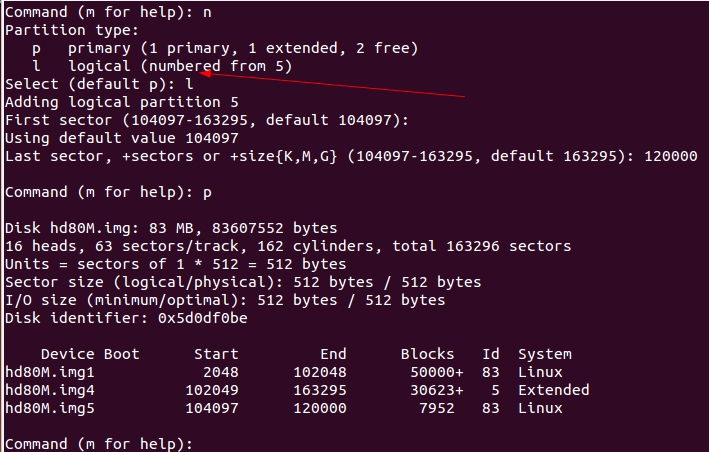
分区表共4个分区,那个分区作为扩展分区都可以,扩展分区是可选的,最多只能有一个;其余的都是主分区。扩展分区中的第一个逻辑分区的编号从5开始。
分区可以继续分成小的子分区,这就是逻辑分区,逻辑分区只存在扩展分区,他属于扩展分区的子集。
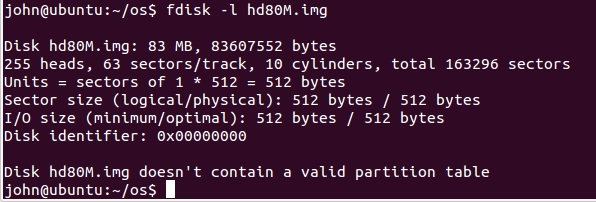
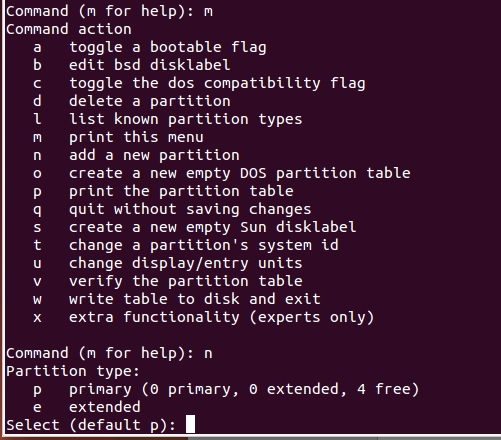
fdisk 分区实践
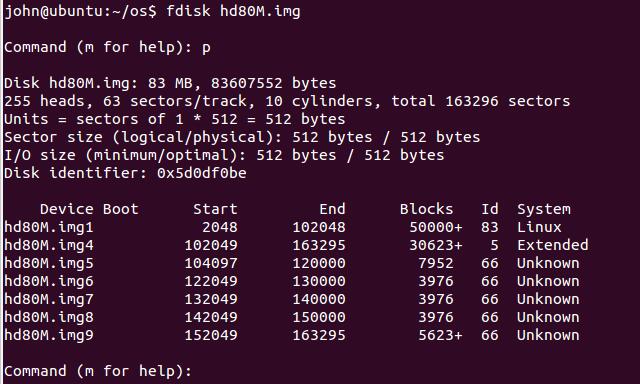
hd80M.img 空盘查看
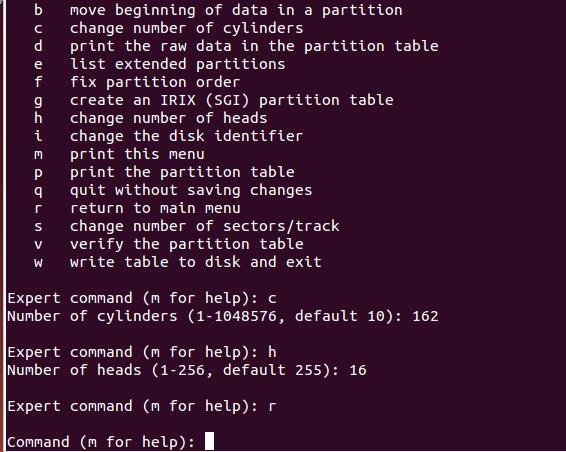
设置磁盘的柱面数,磁头数
添加分区
根据扩展分区创建逻辑分区
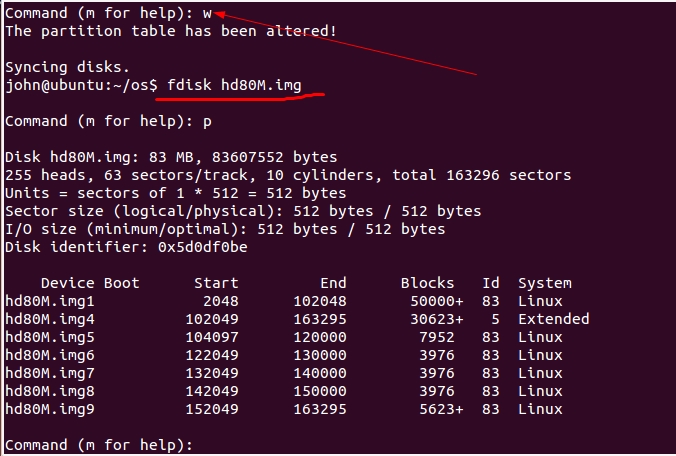
保存分区信息
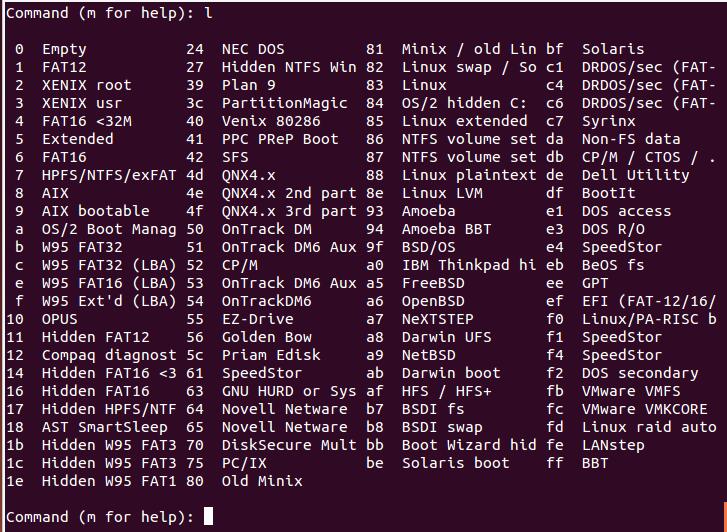
查看已知的文件系统id
设置分区的文件系统id
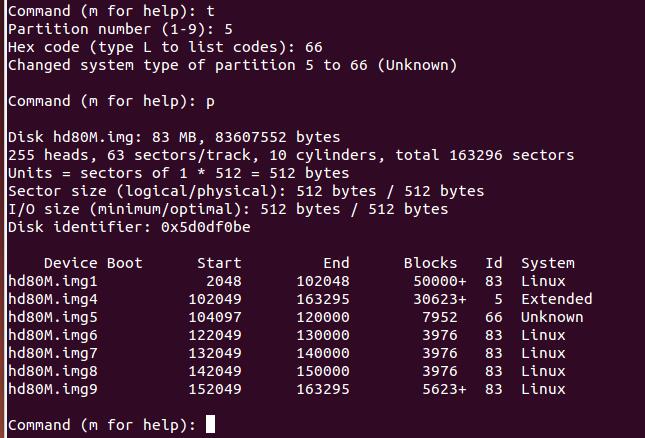
最后的磁盘信息如下
#usage: sh xxd.sh 文件 起始地址 长度
xxd -u -a -g 1 -s $2 -l $3 $1
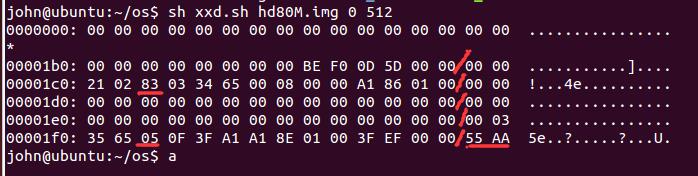
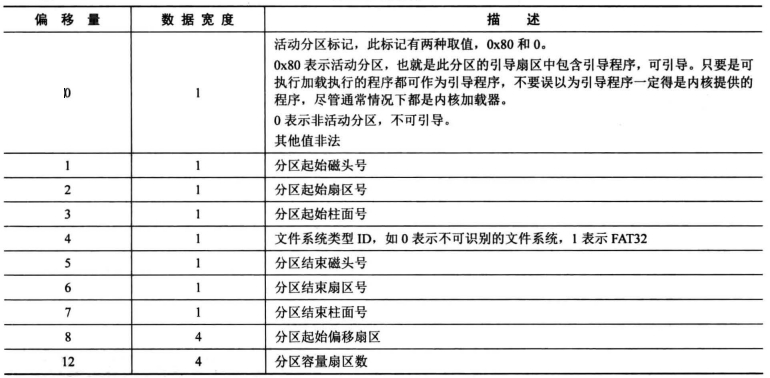
16字节信息规定
第一个主分区
00
00
21
02
83 (文件系统id)
03
34
65
00 08 00 00 ( 分区起始偏移扇区 0x00000800)
A1 86 01 00 ( 扇区总数 0x000186A1)
扩展分区
00
03
35
65
05 (文件系统id)
0F
3F
A1
A1 8E 01 00 ( 分区起始偏移扇区 0x00018EA1 )
3F EF 00 00 ( 扇区总数 0x0000EF3F )
查看扩展分区0x00018EA1*512 = 0x031D4200
sh xxd.sh hd80M.img 0x031D4200 512
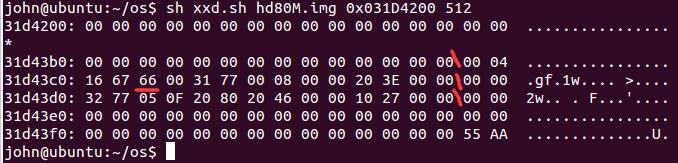
扩展分区的第一个逻辑分区
00
04
16
67
66
00
31
77
00 08 00 00 ( 分区起始偏移扇区 0x00000800,这个是相对扩展分区的,真正对整个磁盘的偏移扇区是 0x00018EA1 + 0x00000800 = 0x000196A1)
20 3E 00 00 ( 扇区总数 0x00003E20 )
编写硬盘驱动程序
硬件是个独立的个体,它提供一套方法作为操作接口给外界调用,但此接口往往是最原始、最简陋、最繁琐的,相对咱们习惯的高级语言来说,这些接口使用起来非常麻烦,很多指令要提前设置好各种参数,基本上都是要用汇编语言来操作寄存器。
硬件是实实在在的东西,要想在软件中管理它们,只能从逻辑上抓住这些硬件的特性,将它们抽象成一些数据结构,然后这些数据结构便代表了硬件,用这些数据结构来组织硬件的信息及状态,在逻辑上硬件就是这数据结构。
驱动程序:
对硬件接口的封装,它把参数设置等重复、枯燥、复杂的过程封装成一个过程,避免每次执行命令时都重复做这些工作,根据需要也可以提供相关的策略,如缓存等,让硬件操作更加容易、省事、方便,无需再显式做一些底层设置。
没有驱动程序的话,操作系统也是可以同硬件交流的,无非是直接操作 IO 端口
硬盘基础回顾
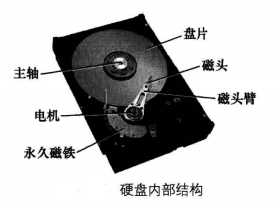
硬盘当成一个IO设备,其有硬盘控制器(I/O接口),就像显示器一样,其有显卡(也称为显示适配器),显存。
针对IDE硬盘,对其进行抽象
/* 硬盘结构 */
struct disk {
char name[8]; // 本硬盘的名称,如sda等
struct ide_channel* my_channel; // 此块硬盘归属于哪个ide通道
uint8_t dev_no; // 本硬盘是主0还是从1
struct partition prim_parts[4]; // 主分区顶多是4个
struct partition logic_parts[8]; // 逻辑分区数量无限,但总得有个支持的上限,那就支持8个
};
/* ata通道结构 */
struct ide_channel {
char name[8]; // 本ata通道名称, 如ata0,也被叫做ide0. 可以参考bochs配置文件中关于硬盘的配置。
uint16_t port_base; // 本通道的起始端口号
uint8_t irq_no; // 本通道所用的中断号
struct lock lock;
bool expecting_intr; // 向硬盘发完命令后等待来自硬盘的中断
struct semaphore disk_done; // 硬盘处理完成.线程用这个信号量来阻塞自己,由硬盘完成后产生的中断将线程唤醒
struct disk devices[2]; // 一个通道上连接两个硬盘,一主一从
};
- 硬盘分区结构也进行抽象
/* 分区结构 */
struct partition {
uint32_t start_lba; // 起始扇区
uint32_t sec_cnt; // 扇区数
struct disk* my_disk; // 分区所属的硬盘
struct list_elem part_tag; // 用于队列中的标记
char name[8]; // 分区名称
struct super_block* sb; // 本分区的超级块
struct bitmap block_bitmap; // 块位图
struct bitmap inode_bitmap; // i结点位图
struct list open_inodes; // 本分区打开的i结点队列
};
/* 构建一个16字节大小的结构体,用来存分区表项 */
struct partition_table_entry {
uint8_t bootable; // 是否可引导
uint8_t start_head; // 起始磁头号
uint8_t start_sec; // 起始扇区号
uint8_t start_chs; // 起始柱面号
uint8_t fs_type; // 分区类型
uint8_t end_head; // 结束磁头号
uint8_t end_sec; // 结束扇区号
uint8_t end_chs; // 结束柱面号
/* 更需要关注的是下面这两项 */
uint32_t start_lba; // 本分区起始扇区的lba地址
uint32_t sec_cnt; // 本分区的扇区数目
} __attribute__ ((packed)); // 保证此结构是16字节大小
/* 引导扇区,mbr或ebr所在的扇区 */
struct boot_sector {
uint8_t other[446]; // 引导代码
struct partition_table_entry partition_table[4]; // 分区表中有4项,共64字节
uint16_t signature; // 启动扇区的结束标志是0x55,0xaa,
} __attribute__ ((packed));
硬盘和 CPU 是相互独立的个体,它们各自并行执行,但由于硬盘是低速设备,其在处理请求时往往消耗很长的时间,为避免浪费 CPU 资源,在等待硬盘操作的过程中最好把 CPU 主动让出来,让 CPU 去执行其他任务
/* 将buf中sec_cnt扇区数据写入硬盘 */
void ide_write(struct disk* hd, uint32_t lba, void* buf, uint32_t sec_cnt) {
ASSERT(lba <= max_lba);
ASSERT(sec_cnt > 0);
lock_acquire (&hd->my_channel->lock);
/* 1 先选择操作的硬盘 */
select_disk(hd);
uint32_t secs_op; // 每次操作的扇区数
uint32_t secs_done = 0; // 已完成的扇区数
while(secs_done < sec_cnt) {
if ((secs_done + 256) <= sec_cnt) {
secs_op = 256;
} else {
secs_op = sec_cnt - secs_done;
}
/* 2 写入待写入的扇区数和起始扇区号 */
select_sector(hd, lba + secs_done, secs_op);
/* 3 执行的命令写入reg_cmd寄存器 */
cmd_out(hd->my_channel, CMD_WRITE_SECTOR); // 准备开始写数据
/* 4 检测硬盘状态是否可读 */
if (!busy_wait(hd)) { // 若失败
char error[64];
sprintf(error, "%s write sector %d failed!!!!!!\n", hd->name, lba);
PANIC(error);
}
/* 5 将数据写入硬盘 */
write2sector(hd, (void*)((uint32_t)buf + secs_done * 512), secs_op);
/* 在硬盘响应期间阻塞自己 */
sema_down(&hd->my_channel->disk_done);
secs_done += secs_op;
}
/* 醒来后开始释放锁*/
lock_release(&hd->my_channel->lock);
}
thread_yield 定义在也read.c 中,它的功能是主动把 CPU 使用权让出来,它与出thread_block 的区别是thread_yield 执行后任务的状态是 TASK_READY,即让出 CPU 后,它会被加入到就绪队列中,下次还能继续被调度器调度执行,而 thread_block 执行后任务的状态是 TASK_BLOCKED,需要被唤醒后才能加入到就绪队列 , 所以下次执行还不知道是什么时候 。
/* 硬盘数据结构初始化 */
void ide_init() {
printk("ide_init start\n");
uint8_t hd_cnt = *((uint8_t*)(0x475)); // 获取硬盘的数量
ASSERT(hd_cnt > 0);
list_init(&partition_list);
channel_cnt = DIV_ROUND_UP(hd_cnt, 2); // 一个ide通道上有两个硬盘,根据硬盘数量反推有几个ide通道
struct ide_channel* channel;
uint8_t channel_no = 0, dev_no = 0;
/* 处理每个通道上的硬盘 */
while (channel_no < channel_cnt) {
channel = &channels[channel_no];
sprintf(channel->name, "ide%d", channel_no);
/* 为每个ide通道初始化端口基址及中断向量 */
switch (channel_no) {
case 0:
channel->port_base = 0x1f0; // ide0通道的起始端口号是0x1f0
channel->irq_no = 0x20 + 14; // 从片8259a上倒数第二的中断引脚,温盘,也就是ide0通道的的中断向量号
break;
case 1:
channel->port_base = 0x170; // ide1通道的起始端口号是0x170
channel->irq_no = 0x20 + 15; // 从8259A上的最后一个中断引脚,我们用来响应ide1通道上的硬盘中断
break;
}
channel->expecting_intr = false; // 未向硬盘写入指令时不期待硬盘的中断
lock_init(&channel->lock);
/* 初始化为0,目的是向硬盘控制器请求数据后,硬盘驱动sema_down此信号量会阻塞线程,
直到硬盘完成后通过发中断,由中断处理程序将此信号量sema_up,唤醒线程. */
sema_init(&channel->disk_done, 0);
register_handler(channel->irq_no, intr_hd_handler);
/* 分别获取两个硬盘的参数及分区信息 */
while (dev_no < 2) {
struct disk* hd = &channel->devices[dev_no];
hd->my_channel = channel;
hd->dev_no = dev_no;
sprintf(hd->name, "sd%c", 'a' + channel_no * 2 + dev_no);
identify_disk(hd); // 获取硬盘参数
if (dev_no != 0) { // 内核本身的裸硬盘(hd60M.img)不处理
partition_scan(hd, 0); // 扫描该硬盘上的分区
}
p_no = 0, l_no = 0;
dev_no++;
}
dev_no = 0; // 将硬盘驱动器号置0,为下一个channel的两个硬盘初始化。
channel_no++; // 下一个channel
}
printk("\n all partition info\n");
/* 打印所有分区信息 */
list_traversal(&partition_list, partition_info, (int)NULL);
printk("ide_init done\n");
}
运行截图
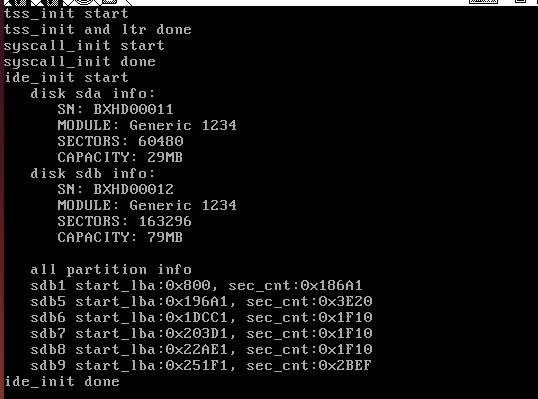
对比磁盘hd80M.img的信息,对比结果